Hello! Welcome to my website! I am currently an Associate R&D Scientist in the Geospatial Artificial Intelligence (GeoAI) group at Oak Ridge National Laboratory (ORNL).
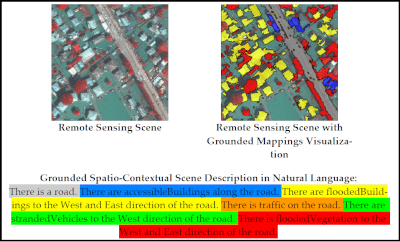
At ORNL, I work on developing scalable machine learning driven geospatial analytics workflows. I earned my Doctoral Degree in Geoinformatics, under the supervision of Prof. Surya Durbha in the GeoComputational Systems Lab at Indian Institute of Technology Bombay. My research interests include Deep Learning for Computer Vision, Large-Scale Satellite Image Processing, Remote Sensing and GIS, High Performance Computing, Geospatial Knowledge Representation and Reasoning, Natural Language Processing, and Internet Of Things. My doctoral research explored the areas of Geospatial Semantics and Deep Learning for Satellite Image Processing, towards leveraging Knowledge Graphs for enhanced Scene Understanding of Remote Sensing Scenes.
As a part of the Google Summer of Earth Engine 2019 Research Program, I worked on "Machine Learning based Mapping of Croplands with Google Earth Engine for Identifying Human-Wildlife Conflict Locations" with Centre for Wildlife Studies. I have been a two-time Google Summer of Code student for the organizations - Cesium in 2015, where I contributed to the NASA's Global Imagery Browse Services (GIBS) by processing and visualizing 3-dimensional LiDAR data from the CALIPSO satellite; and Liquid Galaxy in 2016, where I worked on enabling Cesium for a panoramic experience on the Liquid Galaxy hardware. Prior to joining IIT Bombay as a graduate student for my Masters and PhD, I completed my Bachelors in Computer Engineering from University of Mumbai.
I am an open source enthusiast and have been a code contributor to Mozilla Firefox. When not at my terminal or engrossed in a sci-fi novel, I enjoy travelling places, capturing and captioning the world through my camera.
Talks
Panel Discussion at IEEE HKN TechX Conference
Participated with esteemed researchers in a panel on AI Beyond the Engineering
Watch on YouTube
Google's Geo For Good Summit - Lightning Talk
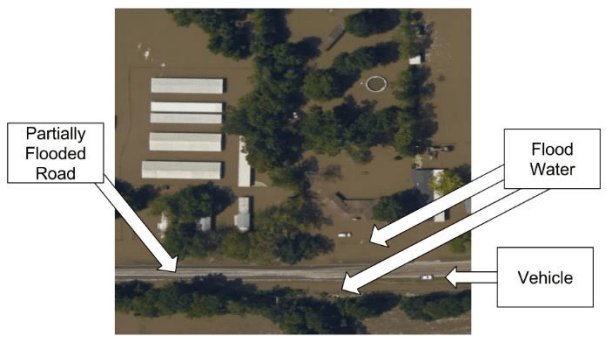
Mapping of Urban Floods from Remote Sensing Scenes using Google Earth Engine
Watch on YouTube
Invited Talk at Vidyavardhini's College of Engg. and Tech., Mumbai
Deep Learning: An Application Perspective Lecture
Watch on YouTube
Invited Talk (Distinguished Lecture Series) at CropIn Technologies
Knowledge Graphs driven Remote Sensing Scene Understanding
Watch on YouTube
Google Earth Engine India - Community On Air Showcase
Flood Inundation Mapping with Google Earth Engine
Watch on YouTube
Google Summer of Code (GSoC) with Cesium
Interactive Visualization of LiDAR profiles from CALIPSO satellite
Watch on YouTube
News Coverage in Marathi - TechFest, IIT Bombay
Demonstration of Pothole Mapping Application for citizens and municipal authorities
Watch on YouTube
News Coverage in Marathi: SenseQube - Towards Precision Farming
Demonstration of SenseQube - An IoT Platform for Smart Agriculture
Watch on YouTube
News Coverage in Marathi: Pratham - IIT Bombay Student Satellite
Launch of Pratham - the first Student Satellite of IIT Bombay
Watch on YouTubeResearch
@article{Potnis2021,
doi = {10.3390/ijgi10010032},
url = {https://doi.org/10.3390/ijgi10010032},
year = {2021},
month = jan,
publisher = {{MDPI} {AG}},
volume = {10},
number = {1},
pages = {32},
author = {Abhishek V. Potnis and Surya S. Durbha and Rajat C. Shinde},
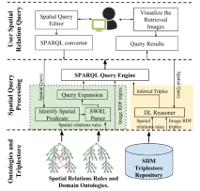
title = {Semantics-Driven Remote Sensing Scene Understanding Framework for Grounded Spatio-Contextual Scene Descriptions},
journal = {{ISPRS} International Journal of Geo-Information}
}
@article{Shinde2021,
doi = {10.1016/j.isprsjprs.2021.08.019},
url = {https://doi.org/10.1016/j.isprsjprs.2021.08.019},
year = {2021},
month = aug,
publisher = {Elsevier},
volume = {180},
pages = {313-334},
author = {Rajat C. Shinde, Surya S. Durbha, Abhishek V. Potnis},
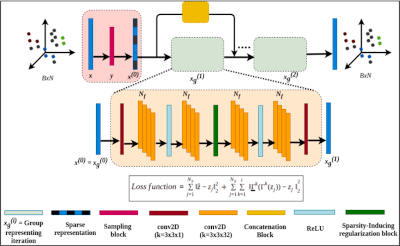
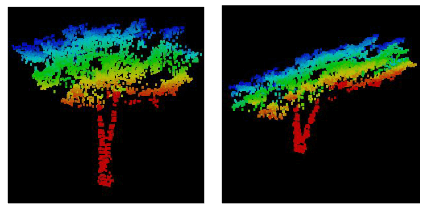
title = {LidarCSNet: A Deep Convolutional Compressive Sensing Reconstruction Framework for 3D Airborne Lidar Point Cloud},
journal = {{ISPRS Journal of Photogrammetry and Remote Sensing}}

@INPROCEEDINGS{9554836,
author={Potnis, Abhishek V. and Durbha, Surya S. and Shinde, Rajat C. and Talreja, Pratyush V.},
booktitle={2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS},
title={Towards Visual Exploration Of Semantically Enriched Remote Sensing Scene Knowledge Graphs (RSS-KGs)},
year={2021},
pages={5783-5786},
doi={10.1109/IGARSS47720.2021.9554836}}
@INPROCEEDINGS{9553785,
author={Shinde, Rajat C. and Durbha, Surya S and Potnis, Abhishek V. and Talreja, Pratyush and Singh, Gaganpreet},
booktitle={2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS},
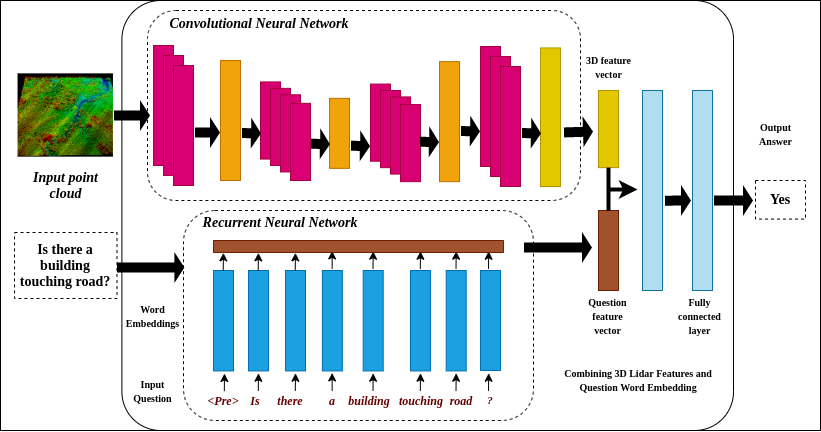
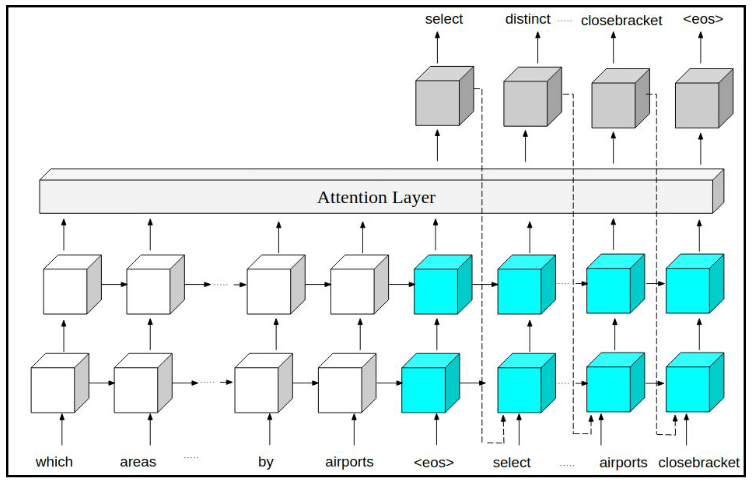
title={Towards Enabling Deep Learning-Based Question-Answering for 3D Lidar Point Clouds},
year={2021},
pages={6936-6939},
doi={10.1109/IGARSS47720.2021.9553785}
}
@INPROCEEDINGS{9554481,
author={Talreja, Pratyush and Durbha, Surya S and Shinde, Rajat C. and Potnis, Abhishek V.},
booktitle={2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS},
title={Real-Time Embedded HPC Based Earthquake Damage Mapping Using 3D LiDAR Point Clouds},
year={2021},
volume={},
number={},
pages={8241-8244},
doi={10.1109/IGARSS47720.2021.9554481}
}
@INPROCEEDINGS{9323183,
author={A. V. {Potnis} and R. C. {Shinde} and S. S. {Durbha}},
booktitle={IGARSS 2020 - 2020 IEEE International Geoscience and Remote Sensing Symposium},
title={Towards Natural Language Question Answering Over Earth Observation Linked Data Using Attention-Based Neural Machine Translation},
year={2020},
volume={},
number={},
pages={577-580},
doi={10.1109/IGARSS39084.2020.9323183}}
@INPROCEEDINGS{9323992,
author={R. C. {Shinde} and A. V. {Potnis} and S. S. {Durbha}},
booktitle={IGARSS 2020 - 2020 IEEE International Geoscience and Remote Sensing Symposium},
title={Online Point Cloud Super Resolution using Dictionary Learning for 3D Urban Perception},
year={2020},
volume={},
number={},
pages={4414-4417},
doi={10.1109/IGARSS39084.2020.9323992}}
@inproceedings{Kurte:2019:SSM:3356395.3365545,
author = {Kurte, Kuldeep and Potnis, Abhishek and Durbha, Surya},
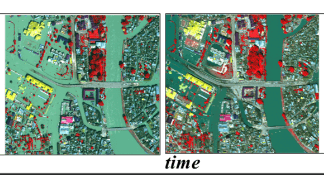
title = {Semantics-enabled Spatio-Temporal Modeling of Earth Observation Data: An Application to Flood Monitoring},
booktitle = {Proceedings of the 2Nd ACM SIGSPATIAL International Workshop on Advances on Resilient and Intelligent Cities},
series = {ARIC'19},
year = {2019},
isbn = {978-1-4503-6954-1},
location = {Chicago, IL, USA},
pages = {41--50},
numpages = {10},
url = {http://doi.acm.org/10.1145/3356395.3365545},
doi = {10.1145/3356395.3365545},
acmid = {3365545},
publisher = {ACM},
address = {New York, NY, USA},
keywords = {discrete mereotopology, flood disaster, ontology, semantics, spatial relations, spatiotemporal},
}
@INPROCEEDINGS{8900250,
author={A. V. {Potnis} and R. C. {Shinde} and S. S. {Durbha} and K. R. {Kurte}},
booktitle={IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium},
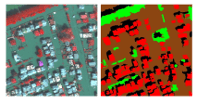
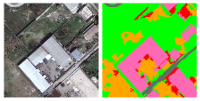
title={Multi-Class Segmentation of Urban Floods from Multispectral Imagery Using Deep Learning},
year={2019},
volume={},
number={},
pages={9741-9744},
keywords={segmentation;flood;multi-class;classification;neural networks},
doi={10.1109/IGARSS.2019.8900250},
ISSN={2153-6996},
month={July},}
@INPROCEEDINGS{8898986,
author={K. R. {Kurte} and A. V. {Potnis} and S. S. {Durbha} and R. C. {Shinde}},
booktitle={IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium},
title={Semantic Framework for Spatial Query Reformulation for Disaster Monitoring Applications},
year={2019},
volume={},
number={},
pages={9946-9949},
keywords={Spatial relations;Query reformulation;SPARQL;RDF;SWRL;Linked data;Disaster response},
doi={10.1109/IGARSS.2019.8898986},
ISSN={2153-6996},
month={July},}
@INPROCEEDINGS{8899871,
author={R. C. {Shinde} and A. V. {Potnis} and S. S. {Durbha} and P. {Andugula}},
booktitle={IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium},
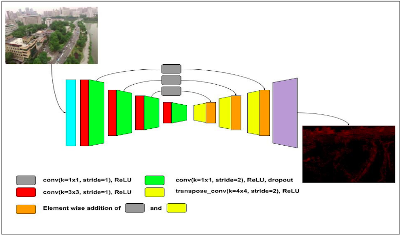
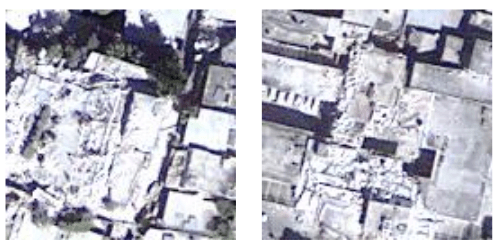
title={Compressive Sensing Based Reconstruction and Pixel-Level Classification of Very High-Resolution Disaster Satellite Imagery Using Deep Learning},
year={2019},
volume={},
number={},
pages={2639-2642},
keywords={Compressed Sensing;Earthquake Disaster Response;Deep Learning},
doi={10.1109/IGARSS.2019.8899871},
ISSN={2153-6996},
month={July},}
@INPROCEEDINGS{8898147,
author={U. {Bhangale} and S. {Durbha} and A. {Potnis} and R. {Shinde}},
booktitle={IGARSS 2019 - 2019 IEEE International Geoscience and Remote Sensing Symposium},
title={Rapid Earthquake Damage Detection Using Deep Learning from VHR Remote Sensing Images},
year={2019},
volume={},
number={},
pages={2654-2657},
keywords={Deep learning;Deep CNN;GPU;damage detection;HPC},
doi={10.1109/IGARSS.2019.8898147},
ISSN={2153-6996},
month={July},}
@INPROCEEDINGS{8517680,
author={A. V. Potnis and S. S. Durbha and K. R. Kurte},
booktitle={IGARSS 2018 - 2018 IEEE International Geoscience and Remote Sensing Symposium},
title={A Geospatial Ontological Model for Remote Sensing Scene Semantic Knowledge Mining for the Flood Disaster},
year={2018},
volume={},
number={},
pages={5274-5277},
keywords={content-based retrieval;data mining;disasters;fires;floods;geographic information systems;geophysical image processing;hydrological techniques;image retrieval;ontologies (artificial intelligence);remote sensing;flood scene ontology;remote sensing scene semantic knowledge mining;content-based image information mining systems;IIM;numerous remote sensing applications;low level image features;satellite images;forest fires monitoring;geospatial ontological model;spatio-contextual semantics;flood disaster phenomenon;flood remote sensing imagery;spatio-contextual semantic gap;flooded regions;flood inundation;flood occurrence;spatio-contextual standpoint;semantic understanding;higher-level semantics;Floods;Remote sensing;Ontologies;Roads;Semantics;Buildings;Resource description framework;geospatial;ontology;contextual;flood;disaster;semantics},
doi={10.1109/IGARSS.2018.8517680},
ISSN={2153-7003},
month={July},}
Image Source: Nvidia
@INPROCEEDINGS{8518403,
author={P. V. Talreja and S. S. Durbha and A. V. Potnis},
booktitle={IGARSS 2018 - 2018 IEEE International Geoscience and Remote Sensing Symposium},
title={On-Board Biophysical Parameters Estimation Using High Performance Computing},
year={2018},
volume={},
number={},
pages={5445-5448},
keywords={crops;embedded systems;graphics processing units;parallel architectures;parameter estimation;power aware computing;radiative transfer;embedded platform;highly computationally intensive;plant growth status;agricultural domain;CUDA code;mobile chip;NVIDIA;mobile processor;embedded high-performance computing;radiative transfer model;energy-aware computationally intensive algorithms;GPU based architecture;modern desktop GPU;Jetson TK1;on-board biophysical parameters estimation;Jetson TK1;Biophysical parameters estimation;GPU;HPC;Radiative Transfer Model},
doi={10.1109/IGARSS.2018.8518403},
ISSN={2153-7003},
month={July},}
@INPROCEEDINGS{8128176,
author={K. R. Kurte and S. S. Durbha and R. L. King and N. H. Younan and A. V. Potnis},
booktitle={2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS)},
title={A spatio-temporal ontological model for flood disaster monitoring},
year={2017},
volume={},
number={},
pages={5213-5216},
keywords={disasters;emergency management;floods;hydrological techniques;ontologies (artificial intelligence);spatiotemporal phenomena;Ontology;dynamically evolving system;flood disaster monitoring;flood dynamic spatio-temporal behavior;flood inundation;general change detection techniques;spatio-temporal dimensions;spatio-temporal ontological model;Buildings;Floods;Geospatial analysis;OWL;Ontologies;Roads;Semantics;4D-fluent;Ontology;Spatio-Temporal},
doi={10.1109/IGARSS.2017.8128176},
ISSN={},
month={July},}
}
@inproceedings{DBLP:conf/semweb/PotnisD16,
author = {Abhishek Potnis and
Surya S. Durbha},
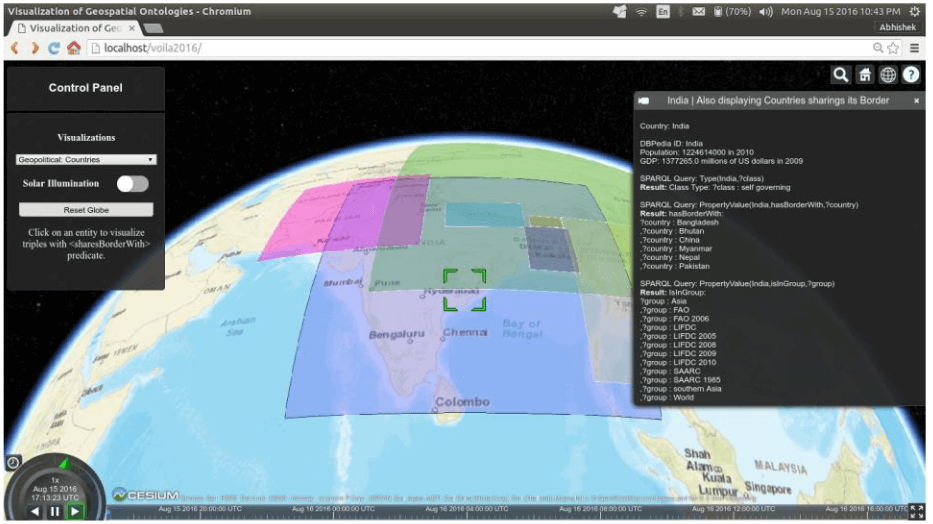
title = {Exploring Visualization of Geospatial Ontologies using Cesium},
booktitle = {Proceedings of the Second International Workshop on Visualization
and Interaction for Ontologies and Linked Data co-located with the
15th International Semantic Web Conference, VOILA@ISWC 2016, Kobe,
Japan, October 17, 2016.},
pages = {143--150},
year = {2016},
crossref = {DBLP:conf/semweb/2016voila},
url = {http://ceur-ws.org/Vol-1704/paper14.pdf},
timestamp = {Wed, 12 Oct 2016 15:50:13 +0200},
biburl = {https://dblp.org/rec/bib/conf/semweb/PotnisD16},
bibsource = {dblp computer science bibliography, https://dblp.org}
}
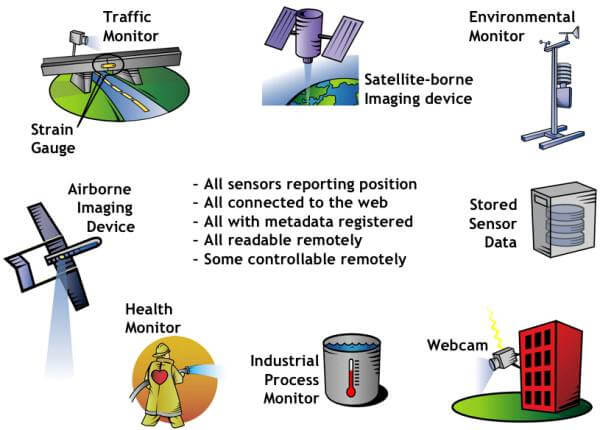
Image Source: OGC
Teaching
- Teaching Assistant, GNR 629: Advances in Geospatial Standards, Interoperability and Knowledge Discovery
- Teaching Assistant, GNR 605: Principles of Geographic Information Systems
- Teaching Assistant, GNR 636: Remote Sensing of Vegetation
- Teaching Assistant, GNR 615: Geographic Information Systems Lab
- Teaching Assistant, GNR 402: Introduction to Geographic Information Systems
Projects
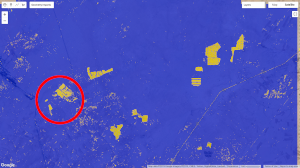
- Implemented Supervised Satellite Image Classification for identifying different crop types using Google Earth Engine for understanding wildlife conflict
- Experimented with different classification approaches such as Random Forest, SVM and ANN, to maximize model performance
- Worked in a team of 6, to solve the Binary Classification problem of detecting solar farms in India
- Employed the Random Forest Classifier with R,G,B, NIR and VV Polarization as features to obtain an Accuracy of 81.07%
- Added Wavelet Kernel-based Convolution as an additional feature to detect solar panels' texture thus improving the Accuracy to 83.65%
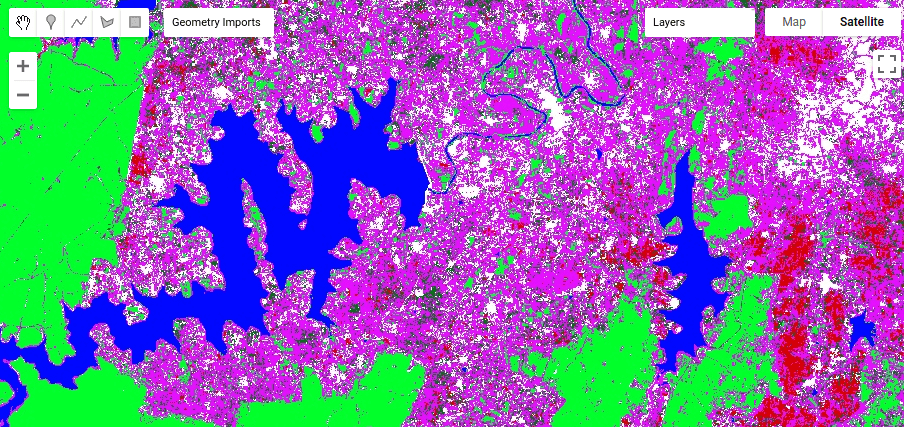
- Studied and implemented End Member Extraction using Pixel Purity Index and Spectral Angle to develop a Classifier for classifying satellite imagery into land use land cover classes.
- Developed an interactive web application to upload a satellite image and perform image classification
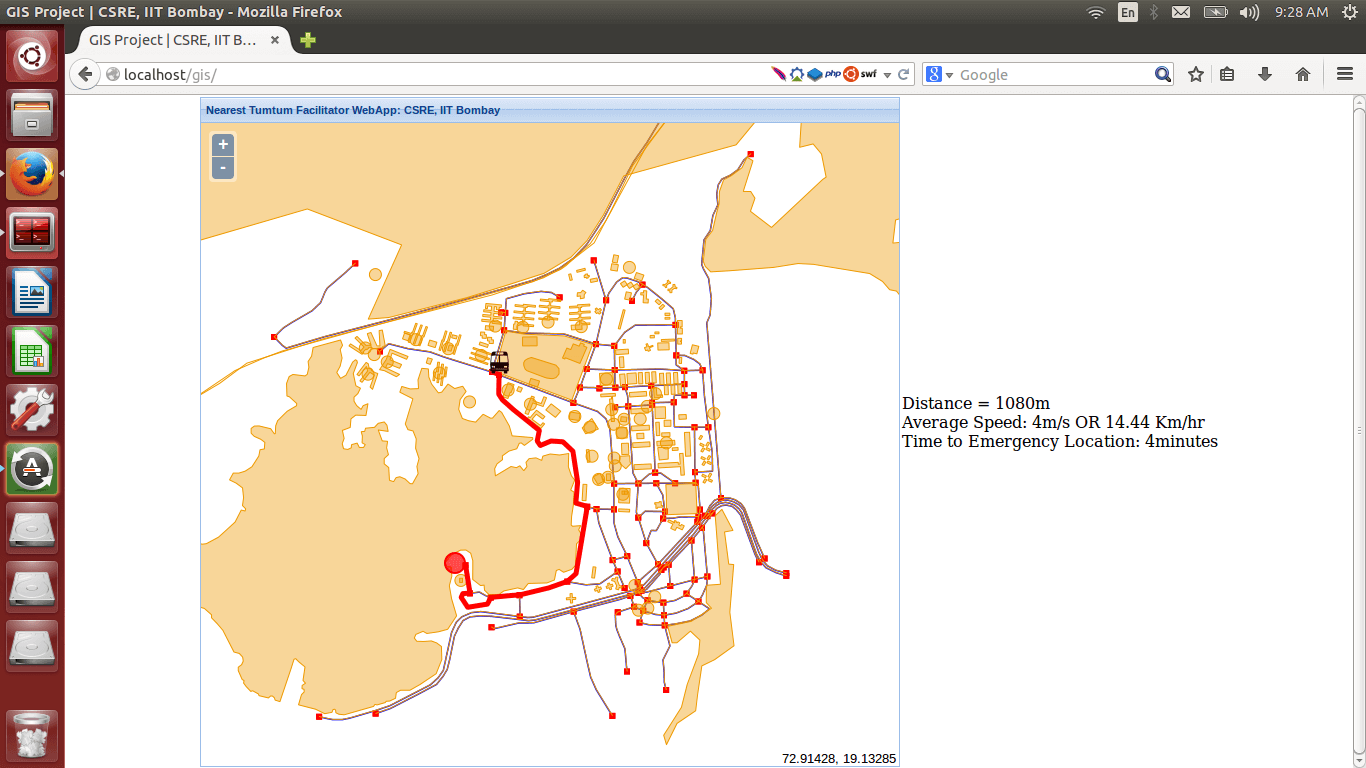
- Implemented a route navigation feature using PgRouting, that would identify the nearest bus from an emergency location and guide it using the shortest possible route computed using the Dijkstra's algorithm, displaying the time to reach the location
- Developed an interactive web application that simulated the mini-bus service in the campus
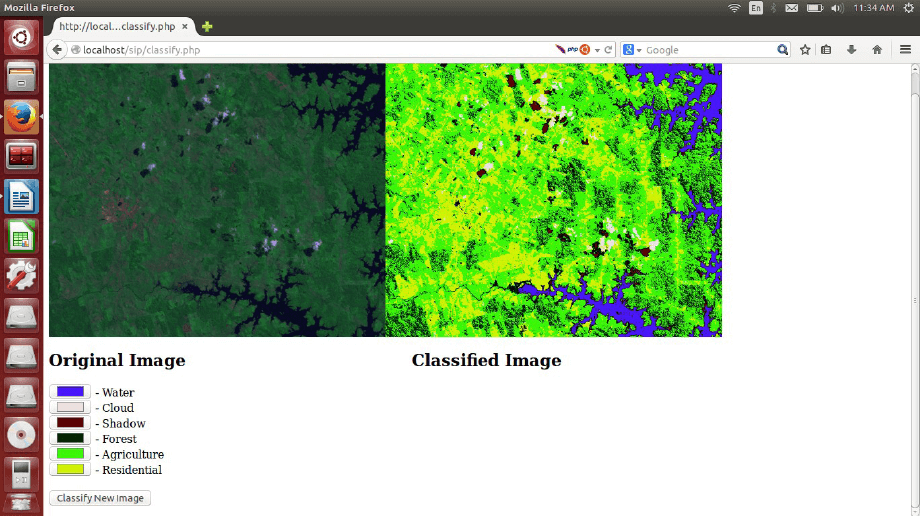
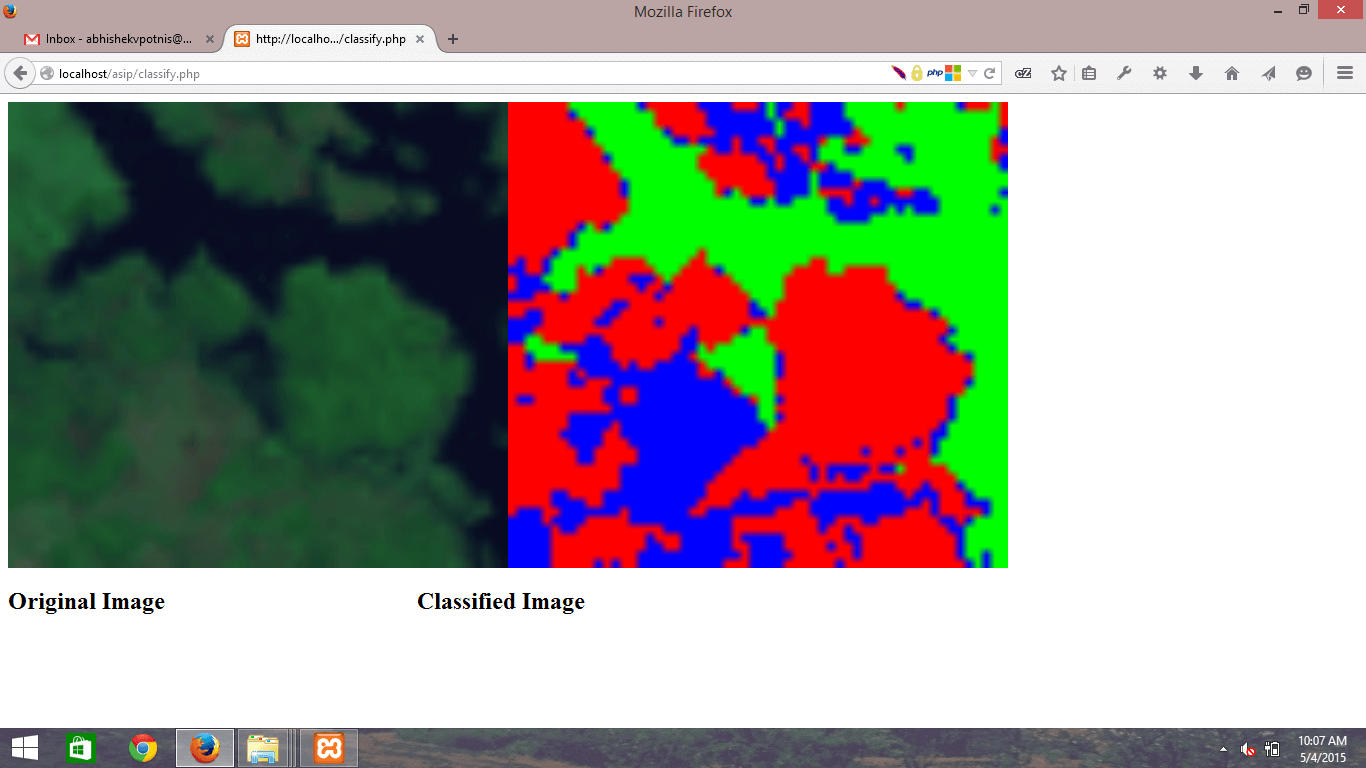
- Studied and implemented the pixel based Parallelepiped Classifier for classifying satellite imagery into land use land cover classes.
- Developed an interactive web application for training the classifier to generate a model and perform satellite image classification
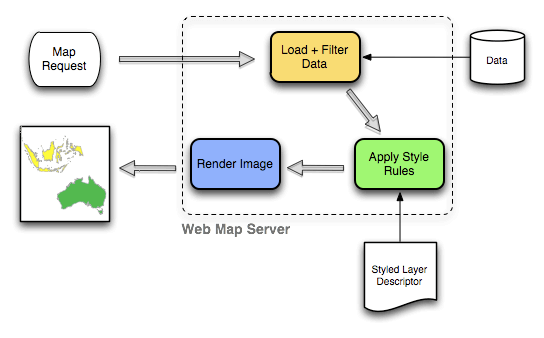
Image Source: OpenGeo
- Developed an AJAX driven interactive web client aimed at integrating and querying Geospatial Web Services using Geoserver and Google Web Toolkit
- Integrated services such as Web Feature Service(WFS), Web Map Service(WMS), Web Coverage Service(WCS) and Sensor Observation Service(SOS) to form a web mash-up
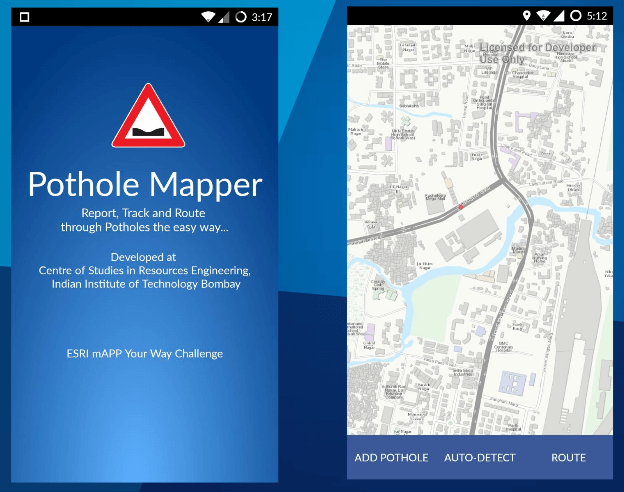
- Developed a GIS based Android and web application to address the issue of monitoring and managing potholes on Indian roads
- Intelligent pothole-free routing for senior citizens, pregnant women and patients
Open Source Contributions

- Developed a Proof of Concept Prototype application that enabled Cesium - an open source virtual globe to run across the multiple displays, providing an immersible and a riveting experience to the users
- Focused on endowing Cesium with features such as Camera Synchronization, Content Synchronization across the displays and Space Navigation Camera Control.
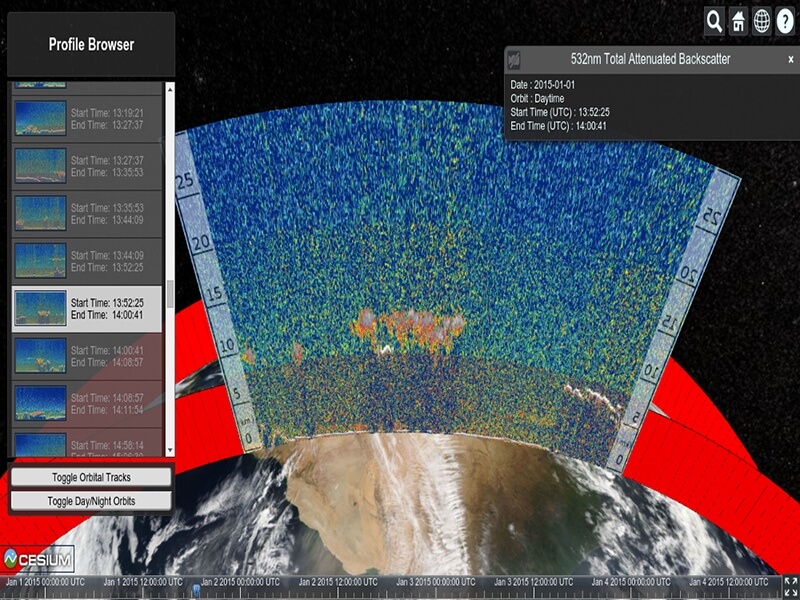
- Developed a web application to visualize LiDAR Profiles captured by the CALIPSO Satellite with the orbital tracks of the satellite and Aqua-MODIS-Reflectance as the base layer, using CesiumJS Library.
- Proposed and implemented the structure of meta-data in .json format to be generated from .hdf files
- Implemented scripts to extract imagery and meta-data from .hdf files, to be consumed by the web app
Image Source: Mozilla
- Fixed bugs by authoring code patches primarily in JavaScript for Mozilla Firefox
- Edited and improved technical articles on Mozilla Developer Network
- Recognized as a core contributor in the “about:credits” section of Mozilla Firefox
- Invited to attend the Mozilla Summit 2013 at Santa Clara, USA
Academics

Indian Institute of Technology Bombay, India
Vidyavardhini's College of Engg. and Tech., University of Mumbai, India
Achievements and Awards
- Recipient of the Academic Research Credits Grant under the framework of Google Cloud Platform Research Credits Programme
- Invited to attend the Geo for Good Summit at Google, Sunnyvale, CA, USA in Sep. 2019
- Successfully completed the project "Machine Learning based Mapping of Croplands with Google Earth Engine for Identifying Human-Wildlife Conflict Locations" with Centre for Wildlife Studies for the Google Summer of Earth Engine Research Program
- Winner of Google Earth Engine India Advanced Summit Buildathon 2019 for the project - "Identifying Solar Farms in India using Machine Learning with Google Earth Engine"
- Finalist in the Google Earth Engine India Challenge 2018
- Recipient of the IEEE Geoscience and Remote Sensing Society Travel Grant to present at IEEE Geoscience and Remote Sensing Symposium (IGARSS) 2018, Spain
- Quarter-Finalist for the India Innovation Challenge 2017 hosted by IIM Bangalore and conducted by Government of India and Texas Instruments
- Recipient of the International Semantic Web Conference 2016 Student Travel Grant funded by Semantic Web Science Association (SWSA) and the US National Science Foundation (NSF) to present at ISWC 2016 at Kobe, Japan
- Recipient of the Ministry of Human Resource Development, Govt. of India Fellowship for Ph.D. students
- Official Mozilla Representative [2013 - 2015]
- Name listed as a Core Contributor on the Mozilla Monument, outside Mozilla’s office space at San Francisco, CA, USA
- Successfully completed Google Summer of Code 2016
- Successfully completed Google Summer of Code 2015
- Represented IIT Bombay for the SAP InnoJAM Challenge 2016 held at SAP Labs, Bangalore
- Winner of the Esri India's mApp Your Way 2015 - A National Level App Development Challenge for the application – 'Route Navigation and Pothole Monitoring using Crowd Sourced Pothole Mapping'
- Successfully completed Module 1 of French Language Course conducted by International Relations Office, IIT Bombay, in association with Embassy of France, New Delhi
- Invited as a Contributor to attend the Mozilla Summit 2013 in Santa Clara, USA
Certifications
- Building Transformer-Based Natural Language Processing Applications [March 2023]
- Natural Language Processing in TensorFlow [January 2020]
- Convolutional Neural Networks in TensorFlow [January 2020]
- Introduction to TensorFlow for Artificial Intelligence, Machine Learning, and Deep Learning [December 2019]
- Instructor: Laurence Moroney, Google
- Deep Learning Specialization [April 2019]
- Instructor: Dr. Andrew Ng, Coursera
- Oracle Certified Professional Java Programmer SE - 6 [July 2012]
- Secured 96% in the OCJP SE-6 Certification Examination
Synergistic Activities
- Manuscript Reviewer
- IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing
- International Journal of Applied Earth Observation and Geoinformation
- Earth Science Informatics, Springer
- Journal of the Indian Society of Remote Sensing, Springer
- Journal of Open Source Software
- IEEE International Conference on Communication Information and Computing Technology 2021 (ICCICT-2021)
- Program Committee Member
Professional Memberships
- IEEE Student Member
- IEEE Geoscience and Remote Sensing Society (GRSS) Student Member
- Student Member of Resources Engineers Association (REA), CSRE, IIT Bombay
Selected Invited Talks
- Delivered Lightning Talk at Google's Geo For Good Summit 2020 on "Machine Learning based Multi-Class Segmentation of Urban Flood Remote Sensing Scenes with Google Earth Engine"
- Delivered Talk on "Machine Learning based Mapping of Croplands with Google Earth Engine" in Partner Panel at Google's Geo For Good Summit 2019
- Delivered Session on "Google Earth Engine and TensorFlow" at the Google Earth Engine Student Summit 2019 at IIT Bombay
- Delivered Talk on "Flood Mapping with Google Earth Engine" at the Community on Air Webinar organized by the Google Earth Engine India Community.
- Delivered Talk on "Role of Deep Learning in Disaster Monitoring" at the Intel AI Meetup, Mumbai
- Conducted a two-day workshop on QGIS with Dr. Kuldeep Kurte for the Geology Community as a part of the GeoWeek of October 2017, held at Fergusan College, Pune in Maharashtra, India
- Delivered Talks on Preparing for Google Summer of Code for students at CSRE,IIT Bombay in January 2017 and January 2018
- Delivered Talk on Getting Involved in Open Source - Contributing to Mozilla at the ISAAC 2014, the Technical Festival of Thadomal Shahani College of Engineering(TSEC), Mumbai in October 2014
- Delivered Talk on Contributing to Open Source at IIT Bombay as a part of the MozTalk conducted by Web and Coding Club, IIT Bombay in June 2013
Summer School and Tutorials Attended
- The 12th Semantic Web Summer School (SSSW 2016), 17th - 23rd July, 2016. University Residential Center , Bertinoro, Bologna, Italy
- Visualization and Interaction for Ontologies and Linked Data, 2nd International Workshop co-located with International Semantic Web Conference 2016, October 17, 2016, Kobe, Japan
- Semantic Web of Things Tutorial by co-located with International Semantic Web Conference 2016, October 17, 2016, Kobe, Japan